图1 下肢全长正侧位三维重建图像
Fig.1 Three-dimensional reconstruction image of lower limb length
注: 蓝色为股骨,紫红色为胫骨和足,绿色为髌骨
·临床研究·
蔡俊丰, 袁 锋, 马 敏, 罗树林, 王 瀚, 尹 峰
(同济大学附属东方医院骨关节科,上海 200120)
【摘要】目的 比较数字化技术和传统定位方法在进行全膝关节置换术(TKA)时对恢复下肢机械轴线的准确性。方法 选取2013年2月至2015年4月膝骨性关节炎患者95例(100膝)进行前瞻性研究。随机分为传统手术组和数字化技术组,每组50膝。传统手术组中48例(50膝),男21例(22膝),女27例(28膝),平均年龄年龄(68.4±7.2)岁,采用传统的标准TKA;数字化技术组中47例(50膝),男20例(23膝),女27例(27膝),平均年龄年龄(69.3±8.2)岁,术前CT扫描和Mimics软件建立患肢股骨和胫骨的三维模型,模拟术中截骨定位杆的使用,确定定位杆在股骨髁的进针点及“术中股骨外翻角”;在关节置换术中精确复制该过程进行股骨远端和胫骨平台的截骨;两组患者采用同一品牌关节假体,所有病例均为同一医师完成手术。两组病例术后均拍摄下肢全长正位X片,测量并比较股骨轴向力线与假体下缘连线的夹角(A角),胫骨轴向力线与假体上缘连线的夹角(B角),股骨轴向力线和胫骨轴向力线的夹角(C角)来验证下肢轴向力线的准确性。结果 数字化技术组47例患者(50膝)“术中股骨外翻角”平均为5.83±1.85°(3.25°~9.36°),术中均能很顺利地找到股骨和胫骨髓内定位杆进针点并进行手术,术后摄片测量平均A角为90.34°±1.61°(87.10°~92.88°),B角为89.97°±1.37°(88.12°~92.33°),C角为1.56°±0.72°(0.11°~2.59°)。传统手术组48例患者(50膝)平均A角为91.18°±2.20°(86.57°~94.59°),B角为88.89°±3.25°(82.19°~ 92.30°),C角为3.21°±1.56°(0.25°~6.32°),差异有统计学意义。结论 参照数字化技术模拟术中定位过程进行术前计划进行截骨可以更好地控制术后下肢轴向力线,有利于更加精确地进行个性化手术。
【关键词】关节成形术; 置换; 膝; 外科手术; 计算机辅助
在全膝关节表面置换术中,下肢轴向力线的控制是非常重要的环节。目前较为成熟的方法是在股骨侧外翻6°截骨,在胫骨侧按胫骨平台中点到第1趾蹼连线的垂直线截骨来控制全膝关节置换术中的下肢轴线力线[1]。但是由于依赖经验成分较多,而且个体的差异也较大,如果根据这单一标准应用于每一个患者,那么将会导致一部分膝关节术后出现轴向力线异常,增加假体的应力,造成假体的容易松动。因此,设想是否可以通过数字化的技术,三维重建患者的股骨胫骨,在三维图像中模拟术中髓内定位杆的插入,确定股骨髁间和胫骨平台的进针点,并测量出“术中股骨外翻角”,然后在术中根据“术中股骨外翻角”进行股骨侧截骨,根据胫骨侧进针点进行髓内定位的平台截骨,真正做到个性化和精确化的截骨,从而保证下肢轴向力线的准确性。
1.1 一般资料
自2013年2月至2015年4月,同济大学附属东方医院骨关节科采用膝关节表面术治疗膝骨性关节炎患者共95例(100膝)随机分为两组,传统手术组中48例(50膝),男21例(22膝),女27例(28膝),年龄58~83岁,平均年龄68.6岁,采用传统的标准TKA;数字化技术组中47例(50膝),男20例(23膝),女27例(27膝),年龄56~85岁,平均69.3岁。
1.2 研究方法
1.2.1 传统手术组 股骨侧采用髓内定位,外翻6度截骨;胫骨侧采用髓外定位,胫骨平台中点到第1趾蹼连线的垂直线截骨。
1.2.2 数字化技术组
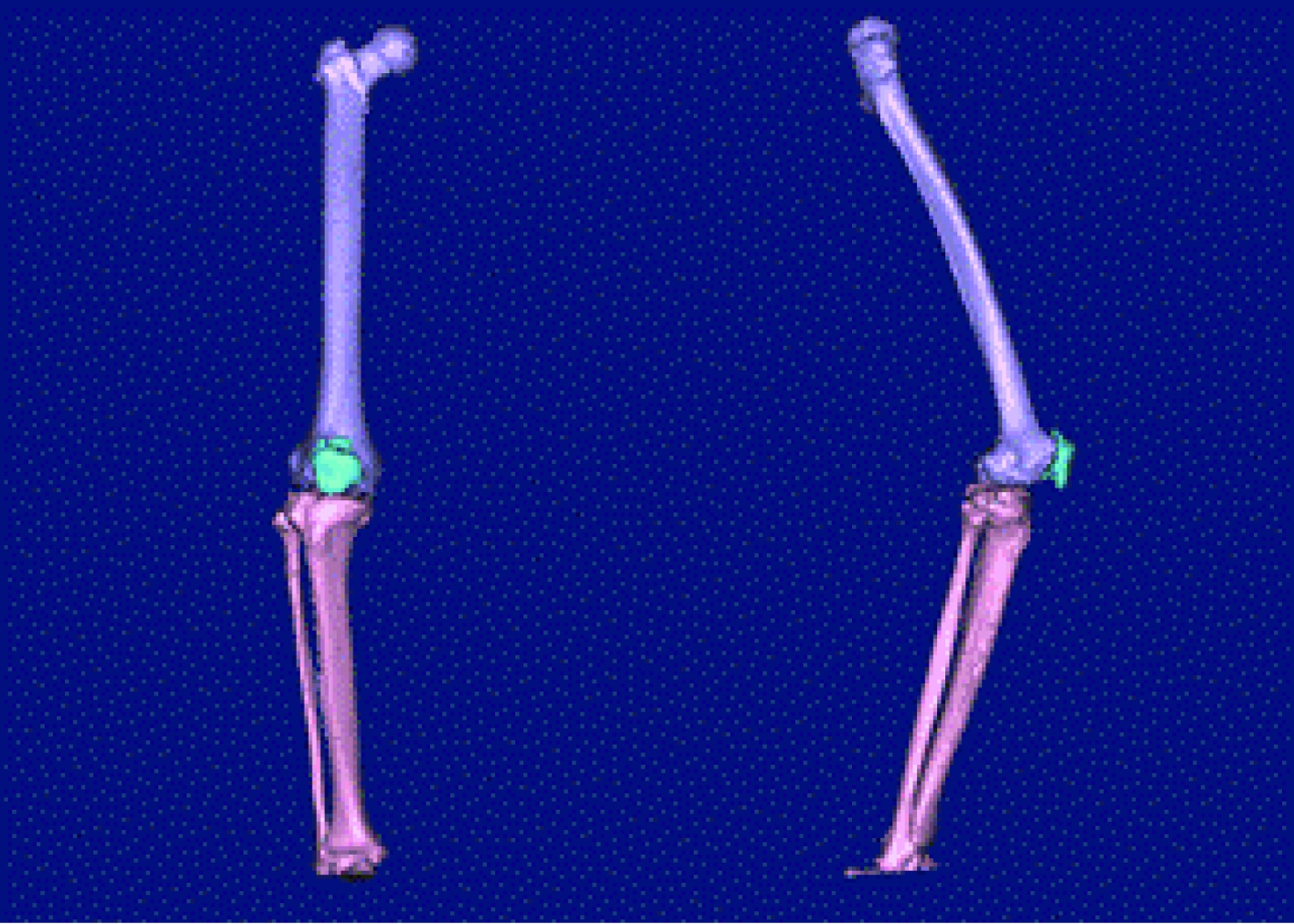
1.2.2.1 下肢建模 所有患者术前进行仰卧位双下肢进行CT扫描(德国GELight Speed64螺旋CT)。扫描参数: 螺旋扫描模式;层厚0.9mm; 120kV,250~300mA;同时使用64排探测器。扫描范围自股骨头至胫骨远端共计约900~1000层。将扫描的Dicom图像数据导入mimics 14.0三维图像处理工作站,使用骨骼重建模式对下肢进行重建。保留股骨和胫腓骨全长、髌骨及足的三维图像,并选取不同的颜色标记以便分割(图1)。
图1 下肢全长正侧位三维重建图像
Fig.1 Three-dimensional reconstruction image of lower limb length
注: 蓝色为股骨,紫红色为胫骨和足,绿色为髌骨
1.2.2.2 股骨侧建模 选取股骨全长。用mimics自带软件Simulation-Cut-With Polyplane和Simulation-Spilt-Two largest parts程序,从股骨远端起20cm(模拟术中使用髓内定位杆的长度)处将股骨切割成二部分,选取远端部分。
“术中解剖轴”的建立: 选择MedCAD-Draw Cylinder建立一个25cm长,直径8mm的柱状体模拟髓内定位杆,移动柱状体模拟术中定位杆的插入使之从股骨髁间最高点插入到髓腔,将柱状体远端置于髓腔中点,将股骨虚化,正侧位、仰视位、俯视位观察柱状体位于髓腔内,侧位平行髓腔,并不与皮质接触(即保证术中髓内定位杆能无阻碍插入),然后在仰视位确定进针点。(图2)。
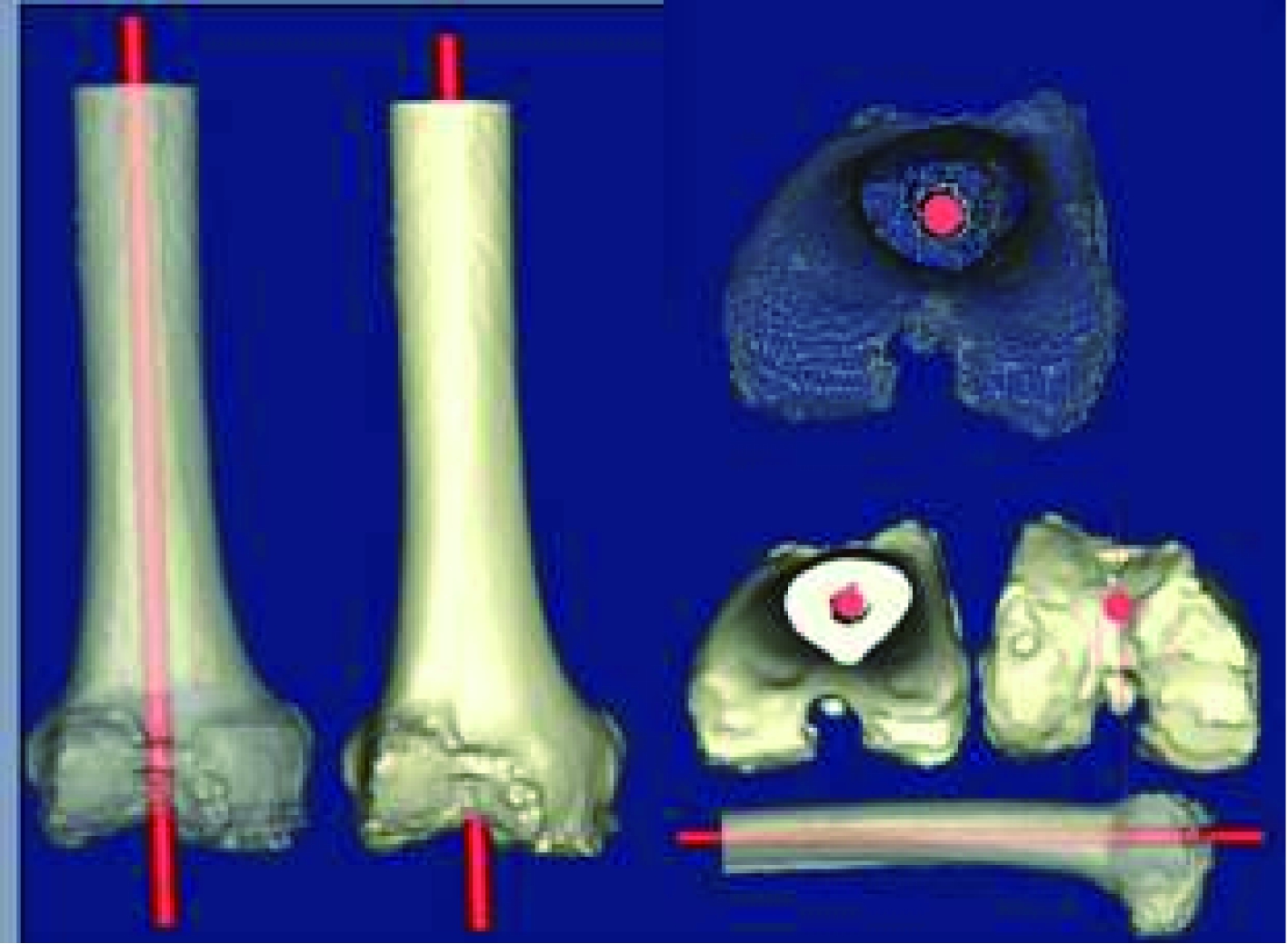
图2 模拟术中定位杆插入
Fig.2 Simulated insertion of the positioning rod during the operation in the femoral
注: 将柱状体插入髓腔,保证柱状体不与皮质接触,然后确定进针点
股骨机械轴的建立: 选择MedCAD-Draw Sphere建立一个球体,充满股骨头,得到股骨头的中心(图3)。连接髓内定位杆的股骨髁间进针点即为机械轴。
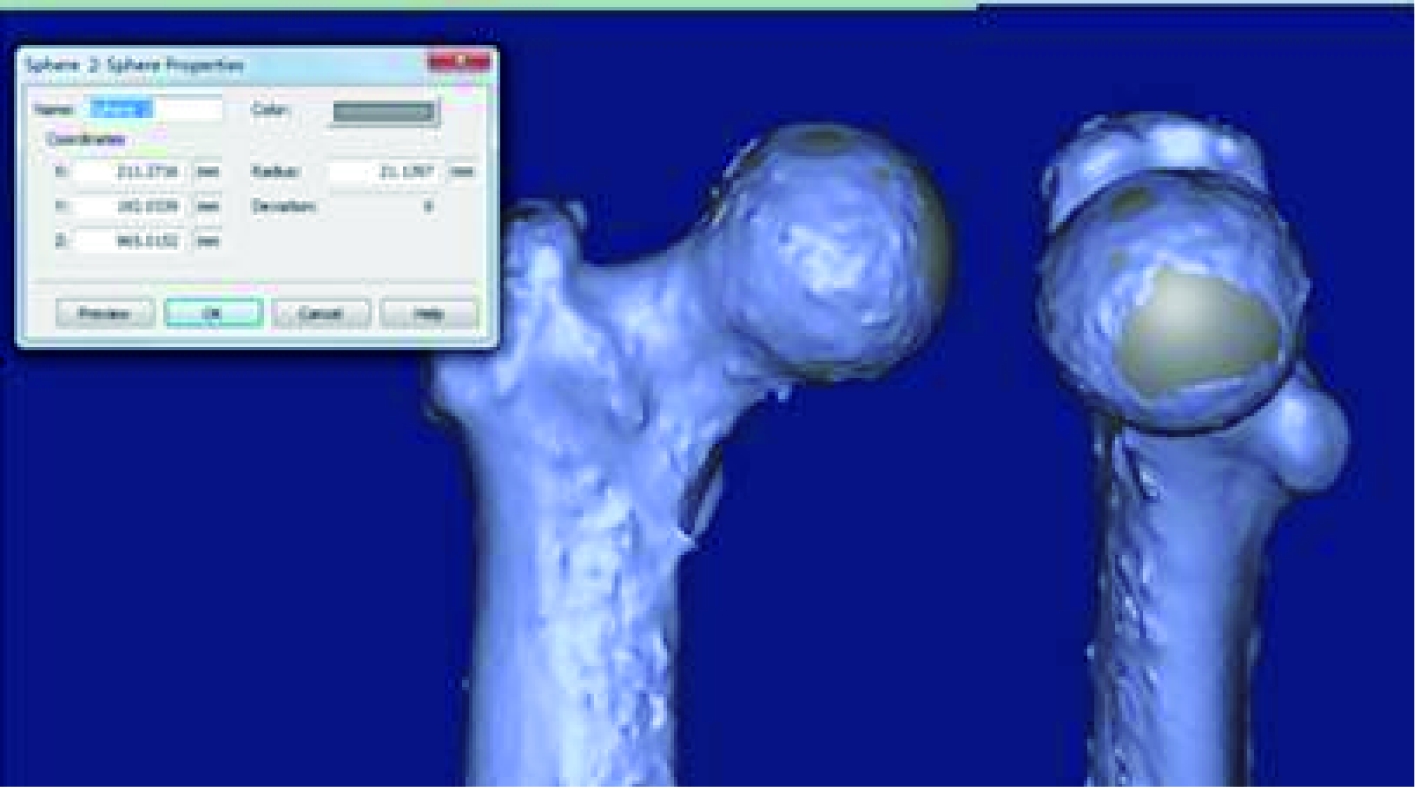
图3 股骨头中心
Fig.3 Center of the femoral head
“术中股骨外翻角”: “术中解剖轴”和机械轴的夹角即为股骨外翻角。使用e-ruler测量尺进行测量,精确到小数点后2位。(图4)
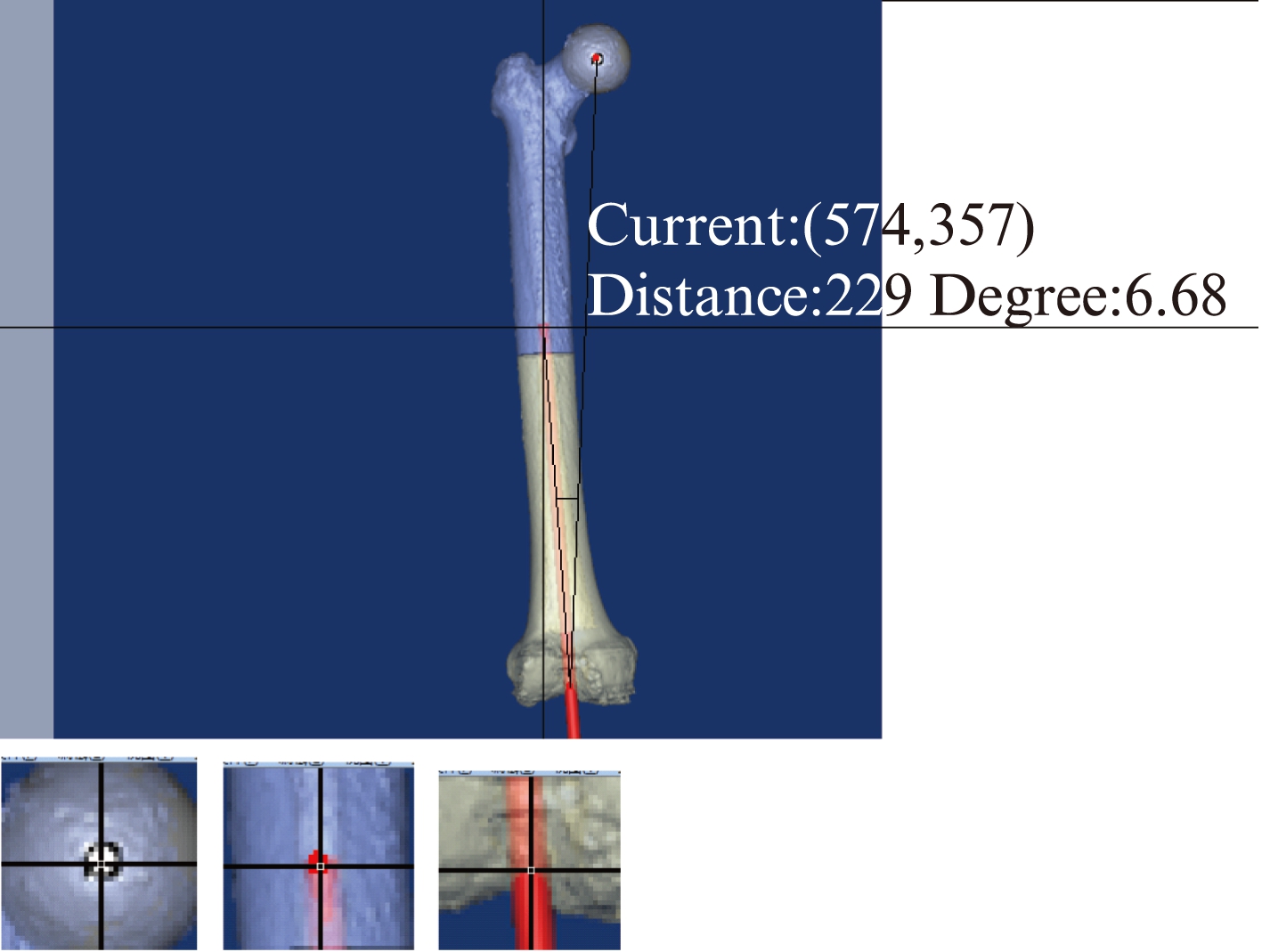
图4 使用e-ruler测量尺个性化测量股骨外翻角的示意图
Fig.4 Individualized measurement of femoral valgus angle with e-Ruler measurement
1.2.2.3 胫骨侧建模 从下肢全长三维影像中选取胫骨,自由旋转至正位。选择MedCAD-Draw Cylinder建立一个直径8mm,长度长于胫骨全长的柱状体模拟髓内定位杆,移动柱状体使之从胫骨平台中间插入到髓腔,将柱状体远端置于踝穴中点,经过胫骨中段髓腔最狭窄处,将胫骨虚化,调整胫骨平台进针点正侧位观察柱状体位于髓腔内,不与皮质接触(即保证术中髓内定位杆能无阻碍插入)。取胫骨平台俯视位,观察柱状体在胫骨平台的位置,即为髓内定位的进针点。在侧位还能计算出患者的后倾角度(图5)。

图5 模拟胫骨侧术中定位插入
Fig.5 Simulated insertion of the positioning rod during surgery in the tibia
注: 将柱状体插入髓腔,远端在踝穴中央,经髓腔狭窄端,不与皮质接触。胫骨平台俯视位,观察柱状体在胫骨平台的位置,即为髓内定位的进针点。也可测量胫骨平台后倾角
1.2.2.4 临床应用 术中按照术前测量的“术中股骨外翻角”角度调试好髓内定位杆角度,并根据参照解剖标志找到术前确定的进针点,进行开孔和插入髓内定位杆进行个性化股骨远端截骨。胫骨按测量的进针点进行髓内定位,并根据所测量的后倾角确定后倾截骨角度进行截骨(图6)。
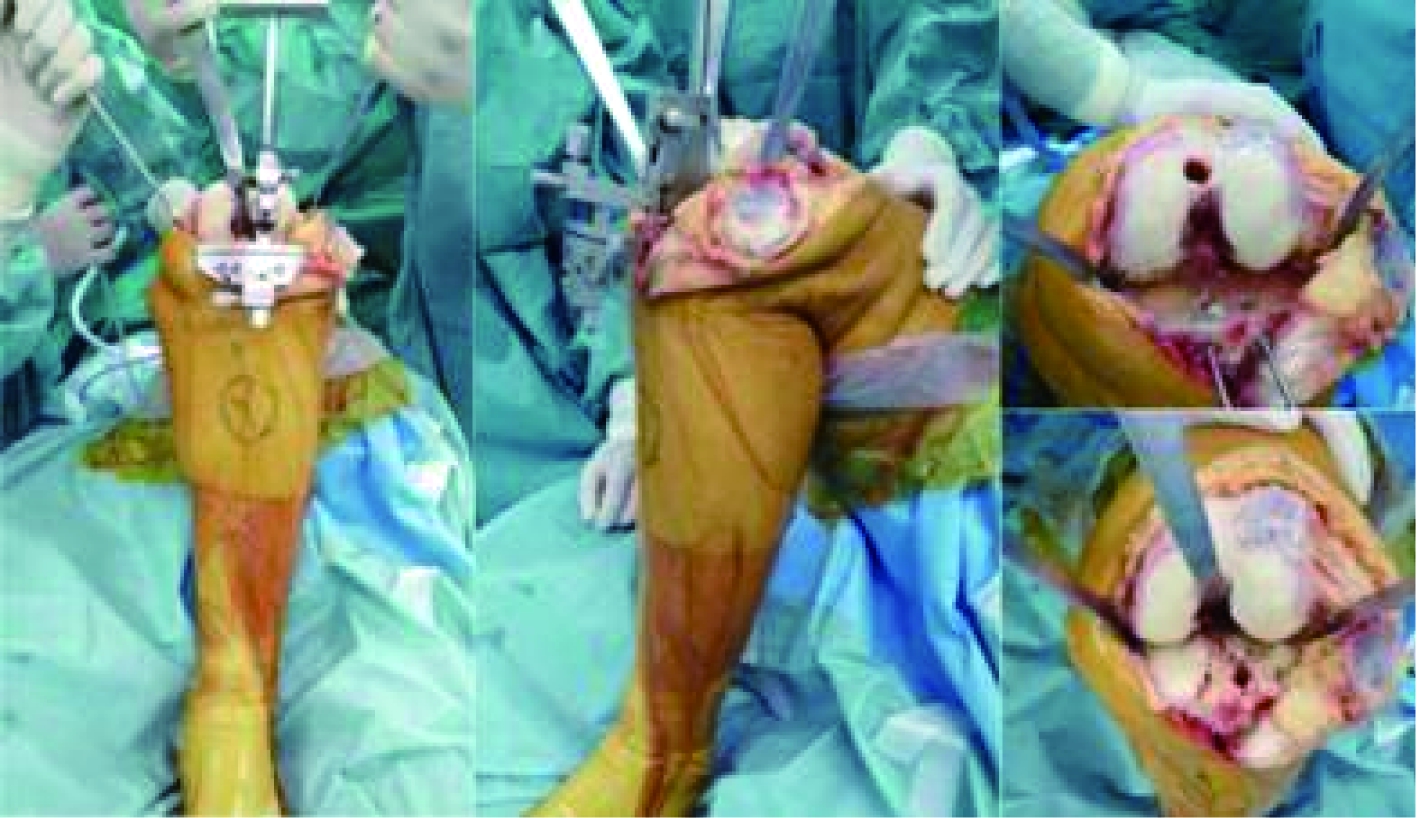
图6 术中截骨
Fig.6 Osteotomy during the operation
1.2.3 术后摄X片检验 术后拍摄下肢全长正位X片,分别测量术后股骨假体轴向力线与假体下缘连线的夹角(A角),胫骨假体轴向力线与假体伤员连线的夹角(B角),股骨轴向力线和胫骨轴向力线的夹角(C角)(图7)。使用e-ruler测量尺进行测量,精确到小数点后2位。
1.3 统计学处理
所有数据均采用SPSS 20.0软件进行统计学分析,数据以![]() 表示,计量资料组间比较采用独立样本t检验,P<0.05为差异有统计学意义。
表示,计量资料组间比较采用独立样本t检验,P<0.05为差异有统计学意义。

图7 术后测量
Fig.7 Postoperative measurement
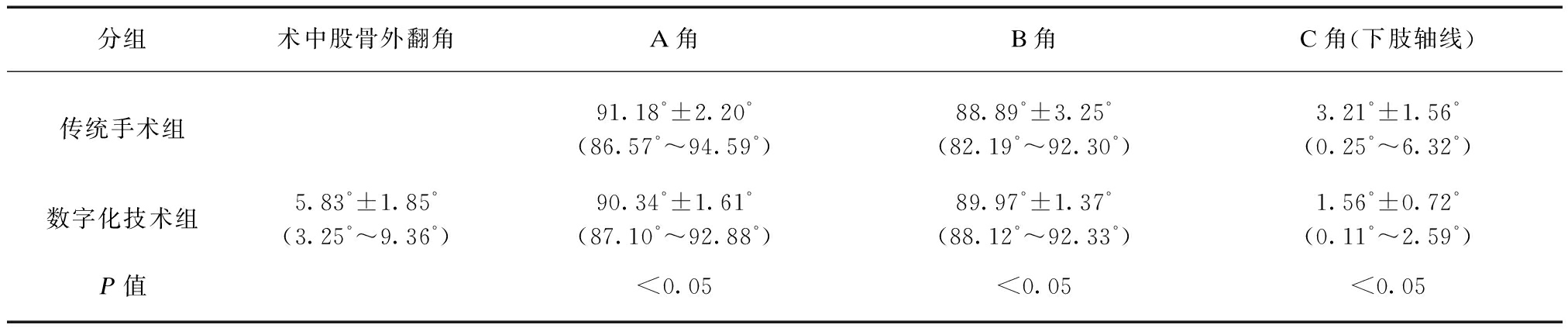
数字化技术组47例患者(50膝)均行术前设计,术中根据解剖标志均能很顺利地找到股骨和胫骨髓内定位杆进针点并进行手术。两组数据按同一方法进行测量,为了减少误差,每个病例由3位关节外科医师同时进行测量并取均值。统计测量的术中股骨外翻角、A角、B角、C角值等数据,见表1。统计学分析显示数字化技术组的轴向力线较传统手术组更接近于90°和0°,差异有统计学意义。
表1 膝关节置换术后下肢轴向力线
Tab.1 Axial alignment of the lower extremity after TKA
作为治疗严重膝关节疼痛、畸形、功能障碍的有效方法,全膝关节置换术(total knee arthroplasty, TKA)在国内外得到了广泛的开展。其中术后下肢的力线是影响假体生存寿命直接相关的原因[2-5]。临床上用于控制股骨侧和胫骨侧轴向力线的方法很多,但大多数方法主要依赖医生的经验,不能进行个性化的手术;而导航技术费用高,操作复杂,学习曲线及手术时间较长,因而限制了其临床推广使用[6-7]。近年来,兴起的个性化截骨工具辅助技术是将导航技术术中定位注册等工作转移到术前完成,节省了手术时间,减少常规手术的并发症,可以取得较好的术后肢体力线,但影像学检查和模块的制作需要额外的时间和大量费用,也限制了临床的常规应用[8-10]。
在股骨侧目前常用的确定轴向力线的方法是髓内定位。多数医生采用的是股骨远端外翻5°~7°截骨,以便使截骨面与股骨机械轴垂直,恢复膝关节正常的应力分布[11-12]。参照西方人的数据,国人是否也是这个数据没有大量样本的报道。而且这种方法多根据经验,因为每个患者的股骨外翻角并不是固定不变的,病例中外翻角度最大9.36°,最小3.25°,波动较大,这不是一个精确的方法。有医生在术前拍摄患者股骨头至踝关节的负重位下肢全长X射线正位片,可以通过测量来确定股骨外翻角的度数,术中进行个性化截骨[13]。由于X光片是二维投影图像,如果遇到股骨弧度大,旋转等畸形程度较大的患者则测量困难或者有很大的误差。随着医学三维技术的进展[14-15],通过螺旋CT扫描后mimics软件的三维重建,可以从任意角度观察并进行测量,给术前计划提供大量准确的信息,而且具有扫描体位不受限制的优势。Novotny等[16]研究表明大多数情况下膝关节中点并非解剖轴定位点。很多临床医生按照解剖轴的定位点作为进针点进行外翻截骨与术前测量结果可能不一致,而导致术前测量进行术前计划没有了意义。前期的研究中提出了“术中股骨外翻角”的概念[17],即根据下肢轴向力线的定义,将膝关节中点即髁间窝中点定义为机械轴和解剖轴共同的定位点,也就是术中定位杆的进针点,而定位杆就是“术中股骨解剖轴”,通过数字化软件三维成像模拟术中定位杆的插入来测量出定位杆和机械轴的夹角,即为“术中股骨外翻角”。术中按照术前测量的“术中股骨外翻角”角度调试好髓内定位杆角度,并根据参照解剖标志找到术前确定的进针点,进行开孔和插入髓内定位杆进行个性化股骨远端截骨。
控制胫骨力线目前较多采用髓外定位法,即在冠状面上,使胫骨平台截骨平面与下肢力线垂直。因此在安装髓外定位器械时,要求髓外导向杆起自胫骨平台中点或胫骨结节中内1/3,沿胫前肌向下,与胫骨前缘平行,指向第一趾蹼和踝穴中心。由于踝穴中心是在内、外踝连线中点的偏内侧3~5mm,故安装髓外导向杆时其远端应对准内、外踝连线中点稍内侧的位置。髓外定位简单易行,准确率也较高,也不必关心胫骨是否畸形或者髓腔很大,因此临床上使用较多。但毕竟是体外定位,踝穴中点在术中不易确定,尤其在与踝关节肥胖、肿胀、畸形的病人,将产生较大的误差。另外,由于足的位置也是由术者摆放,胫骨力线远端对准第一趾蹼也存在的人为的误差。
胫骨髓内定位仅依赖胫骨髓腔来确定方位,而较少依赖术者目测、触摸骨性标志的能力和经验。在客观上比较准确。胫骨平台中心髓内定位的入点位于前交叉韧带胫骨附着点或髁间前嵴的前外侧。有研究结果表明,在前交叉韧带足印迹处确定进钻点,钻较大的孔,将髓腔杆插入胫骨髓腔进行髓内定位,该方法在定位的准确性上与计算机辅助定位技术相当,而且费用较低、近期并发症较少[18]。研究表明,在没有明显畸形的胫骨,髓内定位的准确率要优于髓外定位[19-20]。术前测量术前X线片可以用来帮助确定髓腔杆精确的插入点,使插入的髓腔杆与胫骨髓腔平行。术前X线片只是二维的,需要标准正位片才能确定冠状面的准确性,还不能确定矢状位的进针点,有一定的局限性。根据胫骨轴向力线的定义在三维重建胫骨上模拟术中定位杆的插入可以更准确的找出每个患者胫骨平台的进针点,而不需要钻较大的孔。
胫骨髓内定位的还有一个潜在缺点就是可能会增加脂肪栓塞和静脉血栓栓塞。有学者发现,通过改变髓内定位杆上的凹槽深度和胫骨近端开髓定位孔的大小,可以减轻术中栓塞的程度,还在插入髓腔杆前常规用吸引器抽吸髓腔,进一步减少髓腔栓塞的发生。在病例中并未因为髓内定位而增加了血栓的风险。
通过两组病例术后的复查测量发现参照数字化技术模拟术中定位过程进行术前计划可以获得了很好的股骨、胫骨和下肢假体的轴向力线,验证了运用该技术进行截骨的可行性和准确性,与传统手术比较更为精确,有利于进行个性化手术。股骨胫骨的截骨过程完全复制术前的模拟手术,其具有可预见性。研究中发现如果遇到髓腔狭窄、宽大、畸形等异常情况,在股骨侧均可通过改变髓内定位杆的长度来获得最稳定的“术中股骨外翻角”来指导手术,在胫骨侧可以预见能否进行髓内定位。因此,该技术在特殊病例的价值更大。
【参考文献】
[1] 杨子波,廖威明,傅明.初次膝关节置换术中股骨与胫骨侧截骨的基本技术[J].中华关节外科杂志: 电子版,2012,6(2): 284-286.
[2] Zhang GQ, Chen JY, Chai W, et al. Comparison between computer-assisted-navigation and conventional total knee arthroplasties in patients undergoing simultaneous bilateral procedures a randomized clinical trial[J]. J Bone Joint Surg Am, 2011,93(13): 1190- 1196.
[3] Blakeney WG, Khan RJ, Palmer JL. Functional outcomes following total knee arthroplasty: a randomised trial comparing computer-assisted surgery with conventional techniques[J]. Knee,2014,21 (2): 364-368.
[4] Gothesen O, Espehaug B, Havelin LI, et al. Functional outcome and alignment in computer-assisted and conventionally operated total knee replacements: a multicentre parallel-group randomised controlled trial[J]. Bone Joint J,2014,96-B(5) : 609-618.
[5] 魏艳辉,马敏,尹峰.TKA术中假体旋转力线控制的研究进展[J].同济大学学报: 医学版,2015,36(6): 137-140.
[6] Lützner J, Dexel J, Kirschner S. No difference between computerassisted and conventional total knee arthroplasty: five-year results of a prospective randomised study[J]. Knee Surg Sports Traumatol Arthrosc,2013,21(10): 2241-2247.
[7] 徐军,姜雪峰,孙惠清.计算机辅助下全膝关节置换术对恢复下肢机械轴线的准确性研究[J].上海交通大学学报: 医学版,2014,34(12): 1800-1804.
[8] Chotanaphuti T, Wangwittayakul V, Khuangsirikul S, et al. The accuracy of component alignment in custom cutting blocks compared with conventional total knee arthroplasty instrumentation: prospective control trial[J]. Knee, 2014, 21 (1): 185-188.
[9] Tibesku CO, Hofer P, Portegies W, et al. Benefits of using customized instrumentation in total knee arthroplasty: results from an activity-based costing model[J]. Arch Orthop Trauma Surg,2013,133(3): 405- 411.
[10] 张庆猛,陈继营.个性化截骨工具辅助全膝关节置换术最新研究进展[J].医中国骨与关节外科,2014,7(5): 442-446.
[11] 丁辉,刘文博,王广志.基于CT数据的股骨轴线的获取[J].医用生物力学,2009,24(4): 290-294.
[12] 杨子波,廖威明,傅明.初次膝关节置换术中股骨与胫骨侧截骨的基本技术[J].中华关节外科杂志: 电子版,2012,6(2): 284-286.
[13] 吴昊,查振刚,熊高鑫.全膝关节置换术中精确截骨的疗效观察[J].暨南大学学报: 医学版,2010,31(2): 178-181.
[14] 罗吉伟,覃承诃,胡岩君,等.股骨远端三维截骨测量及假体形态的性别差异分析[J].中华关节外科杂志,2009,3(3): 340-345.
[15] 李钰军,余斌,罗彪,等.基于三维重建技术对国人胫骨近端截面的形态学测量[J].中国矫形外科杂志,2009,17(11): 850-853.
[16] Novotny J,Gonzalez MH, Amirouche FML, et al. Geometric analys is of potential error in using femoral intramedullary guides in total knee arthroplasty[ J]. J Arthroplasty,2001,16: 641-647.
[17] 蔡俊丰,袁锋,尹峰.数字技术在个性化全膝关节置换股骨轴向力线控制中的应用[J].中华关节外科杂志: 电子版,2014,8(1): 91-95.
[18] Talmo CT, Cooper AJ, Wuerz T,et al.Tibial component alignment after total knee arthroplasty with intramedullary instrumentation: a prospective analysis[J]. J Arthroplasty,2010,25(8): 1209-1215.
[19] Cashman JP, Carty FL, Synnott K, et al. Intramedullary versus extramedullary alignment of the tibial component in the triathlon knee[J]. J Orthop Surg Res,2011,6: 44.
[20] 边焱焱,翁习生,林进.人工膝关节表面置换术中胫骨髓内与髓外定位的临床效果比较[J].中国医学科学院学报,2015,37(4): 373-377.
Application of digital technology in control of lower extremity axial alignment in personalized total knee arthroplasty
CAI Jun-feng, YUAN Feng, MA Min, LUO Shu-ling, WANG Han, YIN Feng
(Dept. of Orthopedics, East Hospital, Tongji University, Shanghai 200120, China)
【Abstract】Objective To compare the accuracy of digital technology assisted total knee arthroplasty (TKA) with conventional positioning TKA for restoration of lower-extremity mechanical axis. Methods Ninety five patients(100 knees)undergoing TKA from February 2013 and April 2015 were randomly divided into the conventional surgery (CS) group (48 cases with 50 knees) and the digital technology surgery (DS) group (47 cases with 50 knees). For the DS group, the CT scan images of the lower extremity were obtained and mimics was used to reconstruct the three-dimensional model; according to the definition of axial alignment of the lower extremity, the entry points of femur and tibia were determined and the intraoperative femoral valgus angle was measured by simulating the intramedullary positioning rod; and the osteotomy at the distal femur and the proximal tibia was performed during the surgery. Patients of both groups used the same brand of joint prostheses and all operations were performed by the same surgeon. The angles A, B and C were measured from the X-ray images which were examined after the surgery to verify the accuracy of axial alignment of the lower extremity. Results The average of intraoperative femoral valgus angle of DS group was (5.83±1.85°) (3.25°-9.36°) and it was easy to be found the entry points in the surgery. The angles A, B and C were 90.34°±1.61°(87.10°- 92.88°), 89.97°± 1.37°(88.12°- 92.33°), and 1.56°±0.72°(0.11°-2.59°)in CS group; the angles A, B and C were 91.18°±2.20°(86.57°- 94.59°), 8.89°±3.25°(82.19°-92.30°)and 3.21°±1.56°(0.25°-6.32°), respectively; the difference of two groups was statistically significant (P< 0. 05) . Conclusion The study shows that simulating the intraoperative localization process in preoperative planning via digital technology can lead to better precision of axial alignment of the lower extremity.
【Key words】arthroplasty; replacement; knee; surgery; computer-assisted
doi:10.16118/j.1008-0392.2016.03.019
收稿日期:2015-10-27
基金项目:上海市卫生局基金(20124463)
作者简介:蔡俊丰(1974—),男,副主任医师,硕士.E-mail: dr_cjf@163.com
通信作者:尹 峰.E-mail: 001yinfeng@sina.com
【中图分类号】R 687.4
【文献标志码】A
【文章编号】1008-0392(2016)03-0091-06